

ワカサギ電動リールはけっこう繊細で、その機構の肝はクラッチです。私の電動リールでは磁石を使ってスプールをモーター軸に押し付けることで動力を取り出し、レバーを開くと磁力が外れてスプールがフリーになる方式を採用しています。
磁石には強力なネオジム磁石を使っていますが、それでもスプールとのギャップが紙一枚分ほどズレただけで、使い心地が大きく変わってきます。
目次
最適なギャップ
磁石とスプール底面の磁性体(鉄製のワッシャ)とのギャップ最適値は、大きくても1.5mmくらいまでだと思います。それ以上広く取るとスプールの押し付けが弱くなり、例えば濡れたときなどに空転しやすくなります。磁性体には滑り止めのゴムや紙やすりを貼り付けることが多いと思いますが、その厚みも管理する必要があります。
ギャップの設計
スプールの底面には滑り止めのゴムシートなどを貼っているため、実際に目に見えるギャップは1mm以下になると思います。私の最新のワカサギ電動リールの設計を下記に示します。わかりずらいかもしれませんが、目に見えるギャップはだいたい0.7mm程度となっています。コピー用紙3~4枚分だと考えていただければイメージがつくかなと思います。
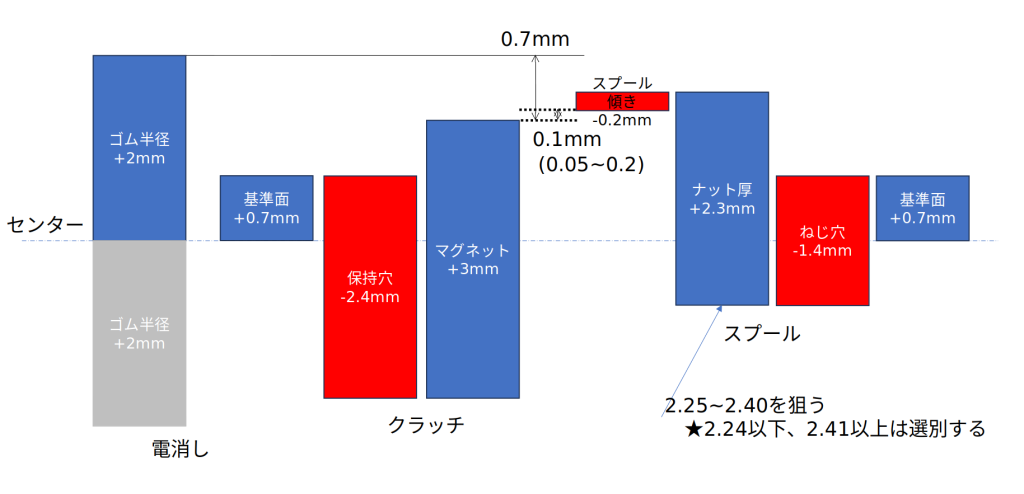
一番左は消しゴムです。消しゴムの直径は4mmですので、電動リールモジュールのセンターに対して2mmほど上下に存在していることになります。また、スプールやクラッチの基準面はセンターから0.7mmの高さに設計してあります。
真ん中がクラッチの設計値です。クラッチにはマグネットを保持するための2.4mmの穴があり、そこに高さ3mmのネオジムマグネットがハマっています。つまり、クラッチの上面から0.6mmほどが頭を出している状態です。クラッチの天面は基準面の高さに合わせてあるので、マグネットは基準面から0.6mmだけ飛び出していることになります。
一番右がスプールの底面の高さの設計です。基準面に対してナットを保持する深さ1.4mmの穴があり、そこにM3ナット(厚さ2.3mm想定 ※規格は2.4mm)がハマります。基準面に対して1mmだけナットが飛び出している状態になります。そのナットの上にスプールを載せるのですが、スプールは若干傾きが発生します。その傾きは0.2mm程度になります。つまり、スプールの天面は基準面からおよそ0.7mmほど上にあることになります。
よってもって、消しゴムがない場合のマグネットの天面とスプールの底面とのギャップは0.1mm程度の設計になっています。この0.1mmはさまざまな誤差の影響を受け、だいたい0.05~0.2mm程度の範囲でばらつきます。
実際に釣りを行っているとき
釣りのときは、この消しゴムの上にスプールが乗っかっており、消しゴムの回転がスプールに対して伝わることでラインの巻取りが行われます。つまり、実使用時のスプールとマグネットとのギャップはだいたい0.7mm程度になるというわけです。
また、消しゴムが極限までヘタってきたときでも、ギリギリ粘ってスプールを回転させる必要があります。そのためには、消しゴムがなくてもマグネットの上面とスプールの底面はギャップを持たせておく必要があります。これは、スプールが軸受となるナットの上に乗っかっている状態になります。このときのマグネット上面とスプール底面のギャップは0.1mm程度になります。
消しゴムが無いとき・ヘタっているとき
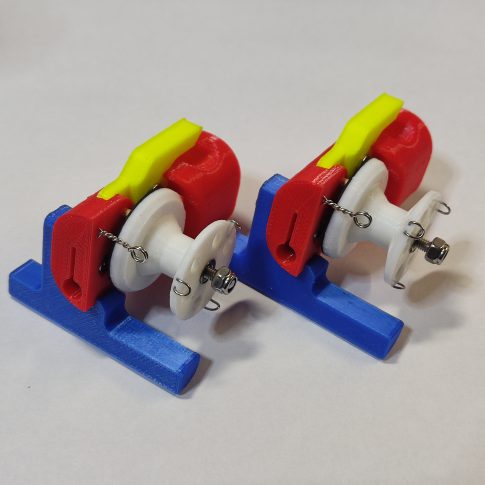
この記事のトップのアイキャッチ写真は電消しがついていない状態のものです。つまり、マグネット上面とスプール底面のギャップは0.1mm程度となっています。0.1mmとは、髪の毛一本分ですね。
この隙間があるため、消しゴムがヘタってもマグネットとスプールが密着せず、ギリギリまでモーターの動力をスプールに伝えることができます。
誤差の影響
きちんと設計しているつもりでも、いろんな誤差によりうまく動かないということはよくあります。この電動リールでも次のような誤差がわかっています。
- 3Dプリンタ出力物の寸法誤差
- スプールの傾き
- ナット厚の誤差
3Dプリンタ出力物の誤差
今考えると、電動リールを3Dプリンタで自作しはじめたころは、3Dプリンタで出力したパーツの寸法誤差でけっこう苦しめられてきていました。(というか、つい最近まで。。。)しかし、ここ1~2年で高性能な3Dプリンタも個人で手が届くようになってきたこともあり、3Dプリンタでの出力パーツでのばらつきは非常に少なくなってきました。
特に2024年になって導入した新機種は、廉価モデルながら高速印刷が可能で、ファン冷却が協力で造形物の歪みも非常に少なく出力できる性能を有していました。数年前なら考えられない性能です。
スプールの傾き
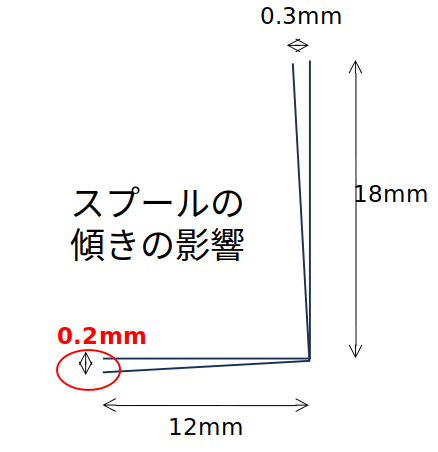
実はここが一番難しく、軸となるM3ネジと、スプールのベアリングの内径との隙間により、どうしても傾きを持ってしまうのです。この傾き量はだいたい0.2mm程度になります。この傾きの存在にはなかなか気づけませんでした(というか、うすうす気づいていたのですが軽く見ていた)。
ナット厚の誤差
しかし、実はまだ難問があります。きちんと計算して設計しているのに、スプールがマグネットと接触してうまく回転しなかったり、ギャップが大きくなりすぎて巻き上げる力が弱すぎたりのばらつきが出てしまうのです。
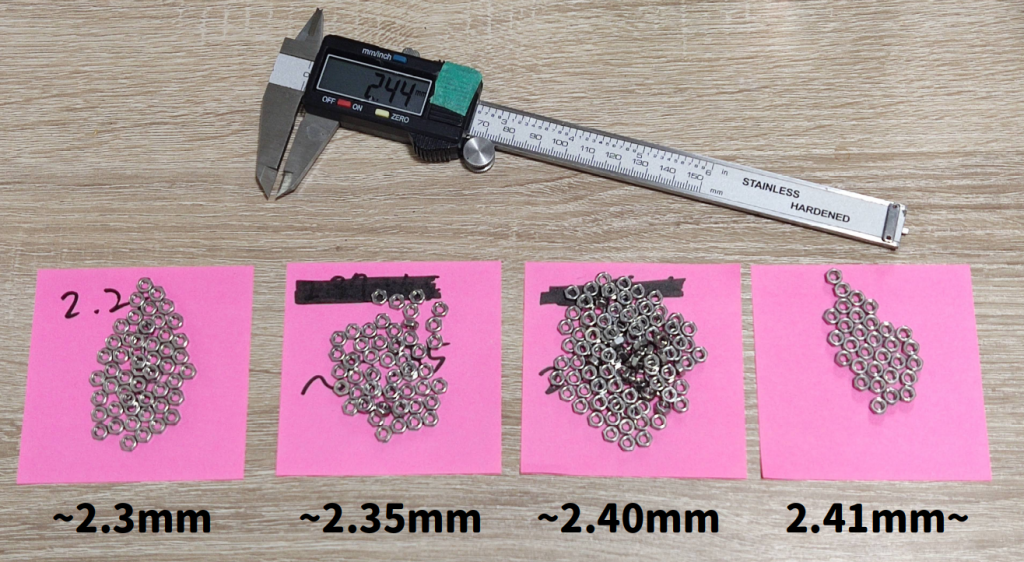
その原因は、スプールの軸受に使っているナットの厚みのばらつきです。M3ナットの厚みは規格では2.4mmですが、実際のところ上の写真のようにかなりのばらつきがあります。これは某中華製のナットだからかもしれません。
薄すぎる場合はマグネットとスプール底面が接触し、厚すぎる場合はギャップが開きすぎて巻き上げ力が弱くなるという症状につながっていました。
そのため、私はナットの厚みを全て計測し、厚みによって使用する場所(用途)を変えるようにしました。
まとめ
もともと、ワカサギ電動リールなんて簡単に作れるんじゃないの?と思って手を出したところ、想像以上に奥が深いなという感触を受けています。5年くらいやってますが、いまだに改善部分が出てくるような状態です。
例えば、今年であれば新しい3Dプリンタを導入したことで、スプールの傾きの影響が見えてきたり、ナットの厚みの影響が見えてきたり、、、という感じです。
まだ、何箇所か改善したいポイントは見えているので、引き続きバージョンアップを繰り返していこうと思っています。










コメントを残す